实验室负责人:李瑞琴 教授
机构创新与机器人装备实验室面向山西经济产业转型发展,以及山西省十三五战略性新兴产业发展的重大需求,以现代机械设计理论与方法、高等空间机构学、机器人学、控制理论、仿真技术、传感技术等为理论基础,以大数据、云计算为导向,开展基于并混联机构理论的智能机器人装备应用基础性研究,服务于山西的高端智能装备产业。
主要研究方向包括:适应复杂环境及多变工作任务的轮腿履复合式移动平台和可重构变形机器人;辅助肢体运动及行走的医疗康复机器人等;用于煤矿井下等危险环境的操作、排险、救灾机器人;用于精密加工的五轴联动混联机床,能够爬楼、进行室内清洁的服务机器人等。
实验室拥有模块化可重构并联机器人、工业机器人、3D打印机等设备,用于本科教学和研究开发。
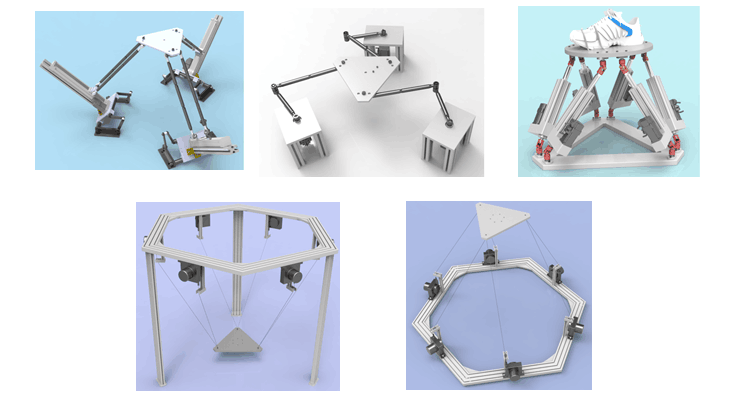
模块化可重构并联机器人主要特点:
(1)机构六套驱动模块,可组合四种常见多种并联式结构;
(2)二次开发方便、快捷,适用于教学实验与研究开发;
(3)内容涵盖机器人运动学、动力学、机械设计、控制系统设计、机器人轨迹规划等。
工业机器人
工业机器人是面向工业领域的多关节机械手,他能自动执行工作,靠自身动力和控制能力来实现各种功能。机器人按照预先编排的程序运行,防止武平。所有工作的完成都具有高效性、持久性、快速性和准确性。

模块化可重构并联机器人

工业机器人
3D打印机


