一、实验目的
1、了解六自由度串联机械手的组成和控制原理;
2、熟悉机械手控制系统的使用;
3、熟悉机械手的操作和使用方法;
二、实验仪器
AIR6A六自由度串联工业机械手(包括本体、控制柜和示教器)一台
三、实验原理
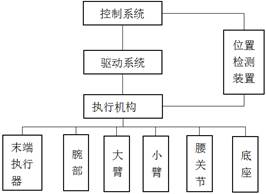
机械手是一种能自动化定位控制并可重新汇编程序以变动的多功能机器。机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。
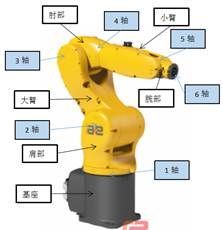
六自由度串联机械手主要包括底座、关节、大臂、小臂、腕部和末端执行器。驱动系统是驱动工业机械手执行机构运动的传动装置。它由动力装置、调节装置和辅助装置组成。常用的驱动系统有液压传动、气压传动、电力传动和机械传动四种形式。控制系统是机械手的指挥系统,它控制驱动系统,让执行机构按规定的要求进行工作,并检测其正确与否。目前工业机械手的控制系统一般由程序控制系统和电气定位(或机械挡块定位)系统组成。控制机械手执行机构的运动位置,并随时将执行机构的实际位置反馈给控制系统,并与设定的位置进行比较,然后通过控制系统进行调整,从而使执行机构以一定的精度达到设定位置。
四、实验内容和步骤
(一)机械手认识实验
该部分的主要是对工业机械手的组成进行系统的认识,让同学们对机械手的运动原理和运动过程深入理解,熟悉机械手的基本运动原理和运动方法,具体步骤如下:
(1)机械手组成
AIR6A六自由度串联工业机器人主要由操作机(本体)、控制柜和示教器三部分组成。
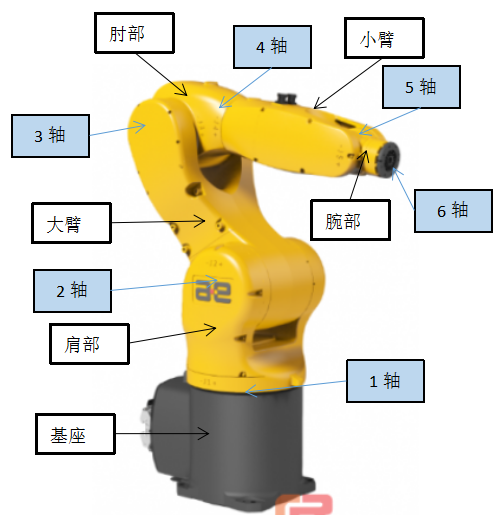


操作机,又称为本体,是指机器人系统中用来抓取或移动物体(工具或工件)的机械结构。AIR6X型工业机器人操作机为六自由度串联式工业机器人,包括三个摆动轴(2,3,5轴)和三个旋转轴(1,4,6轴)。本体主要包括机身安全标识、各轴方向标识、运动范围、轴限位、轴速度和标定。
a. 在本体大臂背面醒目位置贴有此标识,在操作机械手势,必须遵守规则,以免引起不必要的人身伤害。
b. 本体各轴方向标识。该标识在六个轴上均有示意。标识中数字“1”代表1轴;“+”、“-”代表正负运动方向;
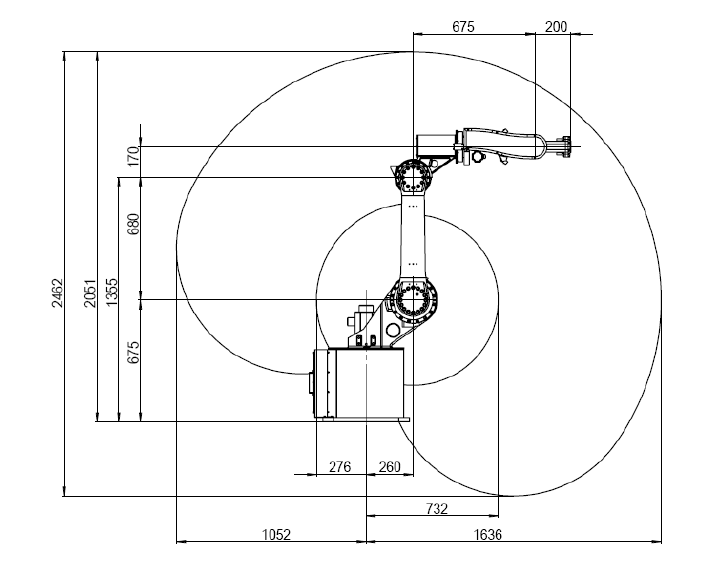
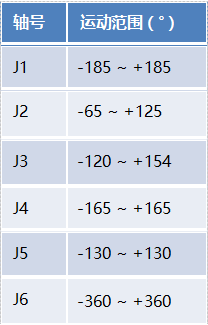
c. AIR16 ARC P本体运动范围。在安装外围设备及示教编程时应注意避免干涉。
d. 各轴限位。各轴分别设有零点和运动范围。机械限位是为了进一步确保安全,正常情况下,机器人软件设置的运动范围<软限位<硬限位。
e. 本体标定。当操作机发生以下情形时,则需要进行重新标定:
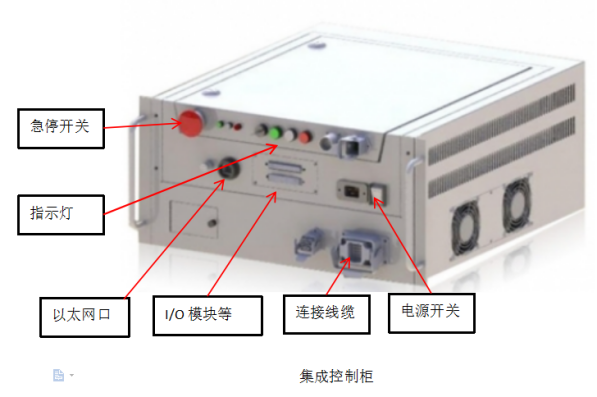
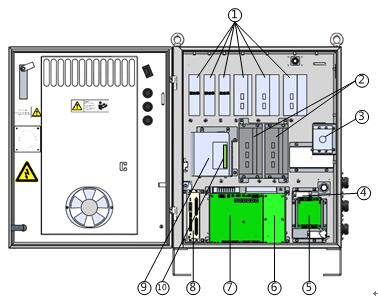
控制柜。控制柜主要有两种类型,传统型控制柜和集成控制柜,其中集成控制柜是将传统控制柜进行了集成,包含传统控制柜的所有模块。传统控制柜主要包括1-驱动器、2-扩展驱动器、3-断路器、4-接触器组、5-安全模块、6-电源转接板、7-PLC_INT、8-PLC_MF、9-工控机、10-AEMC1200运动控制卡十个部分组成。
示教器。教器可以操控机器人手动、自动运行,记录示教点并编程。示教器主要包括急停按钮、使能按键、模式切换钥匙、显示屏、按键等。在对机械手进行“手动模式”操作过程中,示教器的手持方式固定,即左手托持示教器,四指放在“使能”按键上。
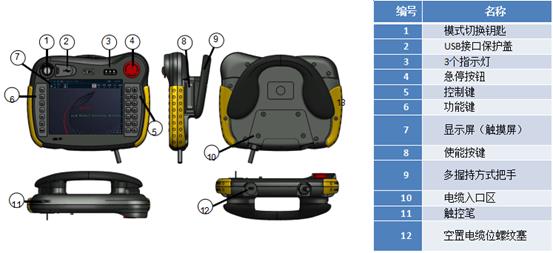
f. 急停按钮。遇紧急情况,按急停按键,机器人立即停止。解除急停状态:顺时针旋转按钮,点击HMI界面上的清除报警按钮,解除报警状态。
g. 使能按键。使能按键位于示教器右侧。手动模式下,使能按键松开时机器人无法运行。示教器模式切换。示教器通过模式选择钥匙切换操作模式;HMI左上状态栏实时显示当前模式。
h. 指示灯。正常运行时,指示灯绿灯亮;出现警报时,红灯点亮,此时一定要先清除警报然后继续操作。
i. 右侧控制键。右侧控制键主要是控制在笛卡尔模式下六轴末端(法兰中心)做直线运动,和在单轴模式六个轴的单轴运动。
(2)传动原理,各轴的传动方式和传动原理
机械手各轴运动时靠电机驱动,其中,五轴和六轴用带传动实现。
(3)简单运动
在对机械手进行操作前,首先要检查本体运动范围内是否有障碍物,确保自身安全和运行安全;
a. 检查示教器和控制柜的“急停按钮”是否复位,控制柜的“示教器屏蔽”按钮是否复位。全部检查完毕后接通电源,打开控制柜“开关”,示教器启动后选择用户名“teacher”进入,模式选择“手动低速”。

b. 进入示教器主界面,在不上“使能”的情况下,点击最上部“状态栏”中“速度和运动坐标系”选择控制模块。
c. 速度:根据实际情况调整速度,在示教时,保持低速运动,速度建议调节到30%以下;
d. 运动模式:选择“单轴模式”或“笛卡尔模式”;
e. 步进倍率:选择“连续”或“点动系列”,一般选择“连续”;
f. 工具:即工具坐标系,默认为FLANGE。在自己建立新的工具坐标系后,可选择新的坐标系;
g. 坐标系:即工件坐标系,默认为World,即世界坐标系,原点位于底座中心。在自己建立新的工件坐标系后,可选择新的坐标系;
h. 工具和坐标系的选择,在不清楚新建坐标系的原点时,考虑到安全问题,禁止随意选择不确定的坐标系。
i. 设置好运动速度、运动模式、步进倍率、工具和坐标系之后,可进行简单运动操作。
j. 手动上“使能”。
 “使能”按键点亮。在选择“单轴模式”情况下,右侧控制键显示J1~J6标识,此时,可以单独移动各轴;在选择“笛卡尔模式”情况下,右侧控制键显示X,Y,Z,a,b,c标识,分别表示六轴末端(法兰中心点)沿世界坐标系的x,y,z方向直行运动和绕z,y,x轴转动。
“使能”按键点亮。在选择“单轴模式”情况下,右侧控制键显示J1~J6标识,此时,可以单独移动各轴;在选择“笛卡尔模式”情况下,右侧控制键显示X,Y,Z,a,b,c标识,分别表示六轴末端(法兰中心点)沿世界坐标系的x,y,z方向直行运动和绕z,y,x轴转动。
(二)机械手控制系统使用实验
(1)控制系统介绍
AIR控制系统主界面可以监控系统状态、当前加载的程序、各轴运动角度,法兰中心点的坐标。可以建立新的运动控制程序;可以通过U盘加载新文件,实现系统的升级。
(2)坐标系建立
建立新的工具坐标系tool1,首先机器人第六个轴的法兰要连接末端执行器1(即连接新的工具),运动过程中选择tool1就是1工具末端点的运动。
工具坐标系建立步骤如下:
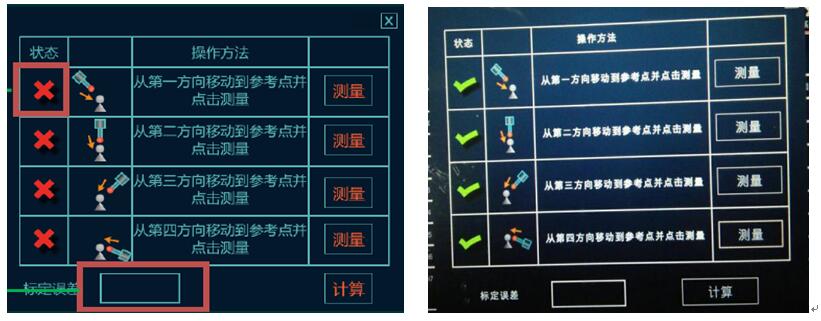
a. 点击“运行”,选择“坐标系测量”,选定“工具坐标系”;
b. 点击编号“0”前的圆点,点击测量,选择四点法;
c. 选定一工件点,从四个方向进行依次测量,尽量使6个臂都改变(每次测量机器人的姿态都要保持大幅度的改变),以保证精度;
d. 绿色对勾表示成功,点击计算,得到标定误差,系统的标定误差可控制在0.2-0.4mm,因此,标定误差过大请重新标定。
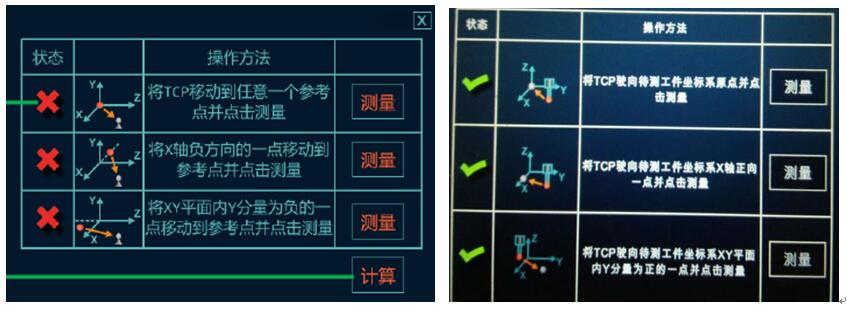
工件坐标系。
e. 点击 状态栏,改变工具为0tool0,即刚刚建立的工具坐标,同时改为笛卡尔坐标系
f. 点击右侧测量,选择三点法,再依次测量,绿色对勾表示成功。注意,第一次测量同于四点法,第二次只需在xoy面上移动到某一点,第三次测量以前两次为基础,同样在xoy面移动建立右手系确定第三点的大概方位。使各个坐标系统一。点击计算,保存,建立成功
(三)运动操作及程序编写
g. 钥匙打到”手动低速状态(中间)”状态,速度≤30%,左手握示教盒,保持”伺服上电”,右手按键移动机械手;
h. 插入move指令:movej(移动关节),ptp(点到点),lin(直线),cir(圆弧)。
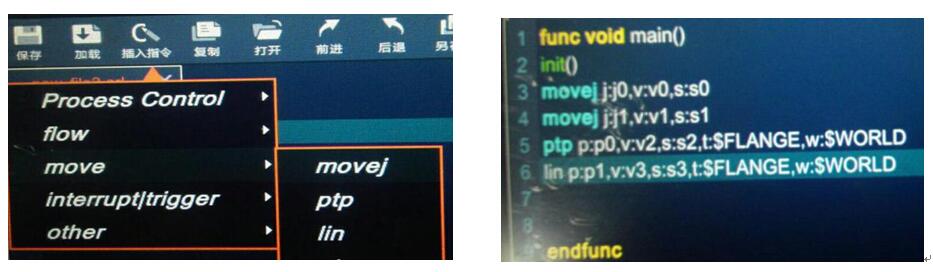
i. 添加moveJ运动指令。保持”伺服上电”→运动机械手使其运动到某一需要的位置→”伺服下电”→点击”插入指令”→”move”→”moveJ”→屏幕右下方”插入指令”→消息:确认添加指令”确定”→消息:确认添加变量”确定”;(此时,轴位置j0指的是1-6轴各轴的一个数据的集合,同理v0也是六个轴的速度集合。平滑s0是曲线过渡位置的平滑程度,可设置平滑指数的大小,0最小)
j. 重复添加movej指令。运动机械手到一新位置,(注意只有在移动机器手时才使伺服使能)点击确定添加指令,确定添加变量;
k. 重复添加ptp,lin指令,操作同上;(ptp点到点运动就是确定运动的起始点和终止点;
l. 继续添加cir指令,有细微区别,此处需要添加圆弧上另一点为辅助点;
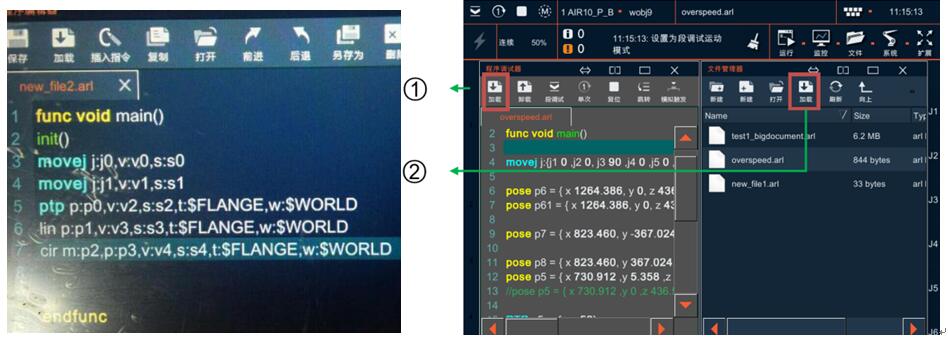
m. 点击”加载”(①)按钮,打开文件管理器,如图,从文件管理器中选择并”加载”(②)程序;
n. 开始执行程序,使伺服使能,点击右侧控制按键的绿色“开始”按钮,依次运行各程序;
五、实验报告要求
1、简述机械手的组成;
2、掌握机械手的使用方法,能编写简单的运动和逻辑控制程序;
3、掌握机械手工具和工件坐标系的建立方法;



